
{학습 목적}
Chapter 13에서는 기저의 변환에 대해 학습한다.
기저의 변환이 왜 중요한 지는 이 챕터를 통해 깨닫지는 못했다.
하지만 기저의 변환을 통해 특정 벡터를 또 다른 관점에서 볼 수 있는 방법을 학습함으로써 선형 변환과 행렬의 곱을 통한 연속적인 변환의 역할이 기저의 변환에 쓰인다는 것을 통해 이들의 역할에 대해서 다시 한번 강조하는 것 같았다.
<기저의 변환>
만일 우리가 2d 공간에 있는 하나의 벡터를 놓는다면, 우리는 좌표를 사용해서 이 벡터를 묘사하는 기본적인 방법을 갖게 된다.
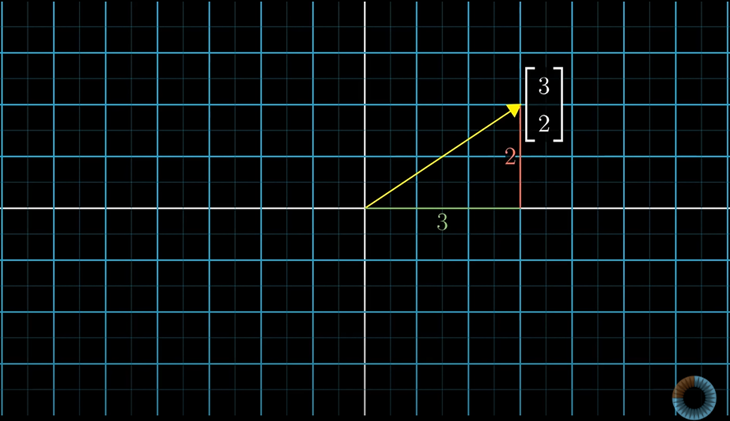
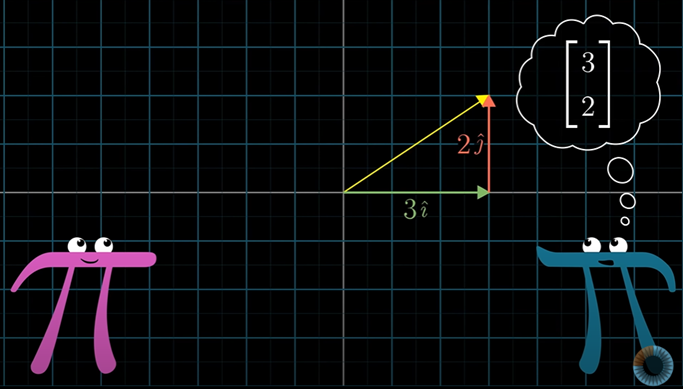
예를 들어 [3,2]좌표값을 갖는 벡터를 생각해보자
이것은 꼬리에서 머리까지 오른쪽으로 3칸 움직이고, 위로 2칸 움직인다는 것을 의미한다.
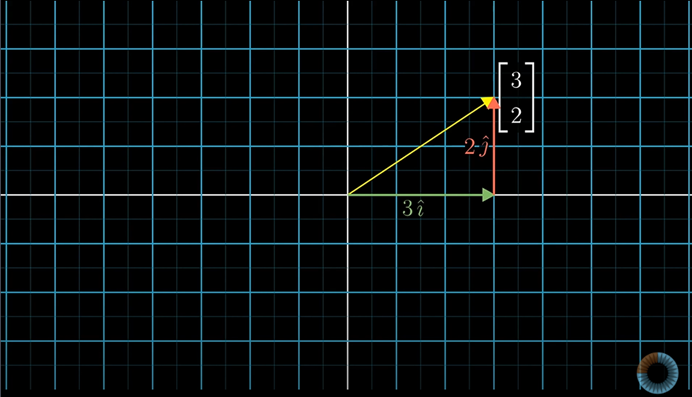
선형대수에서 좌표를 설명하는 방법은 각각의 숫자를 스칼라로 이루어져있다고 생각하는 것이다.
이 스칼라를 늘이거나 쪼그라든 벡터라고 생각하면서, 첫 번째 좌표를 i-hat이라 부르고,
그것은 길이가 1이고 오른쪽을 가르킨다고 생각한다.
두 번째 좌표 스케일인 j-hat은 길이가 1이고 위를 가르킨다고 생각한다.
이 두 개의 벡터를 머리와 꼬리를 이으면서 더하는 것은 좌표를 묘사하는 방법을 의미하는 것이다.
이러한 두 개의 특별한 벡터를 모든 좌표계의 임의의 가정을 포함하는 것으로 생각할 수 있다.
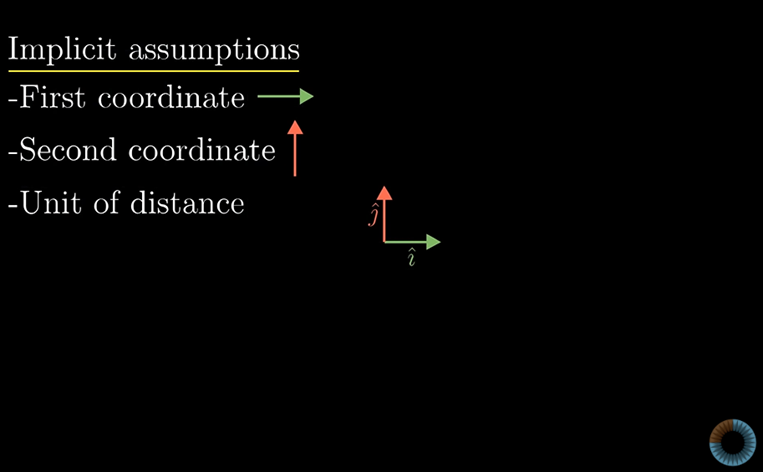
첫 번째 숫자는 오른쪽을 , 두번째 숫자는 윗 방향을 가르킨다는 사실은 정확한 단위 길이를 표시한다.
i-hat j-hat의 선택을 묶는 모든 것은 벡터로 되는 좌표는 스칼라이고 실제로 확장하기 위한 것이다.
즉, 벡터와 수의 집합을 연결하는 것을 좌표계(coordinate system)이라고 부른다.
그리고 두 특수 벡터, i-hat과 j-hat은 기저벡터(basis vector)라고 부른다. 우리의 표준 좌표계에서 말이다.
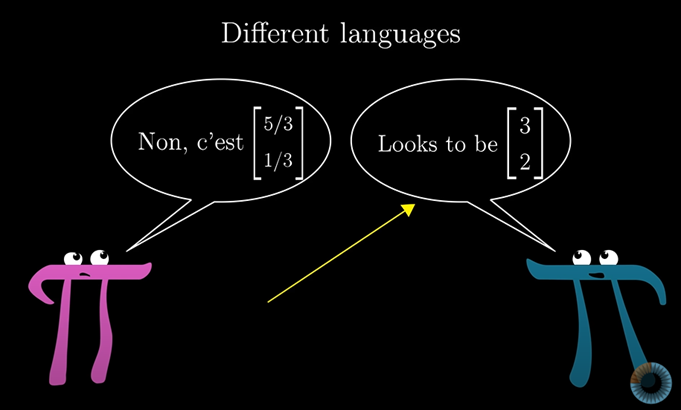
이 챕터에서 배우는 내용은 다른 기저 벡터의 집합을 사용하는 아이디어이다.
우리는 모두 공간 안에서 같은 벡터를 보고 있지만, 제니퍼(또 다른 사람)는 그것을 설명하기 위해 다른 단어와 숫자를 사용한다.
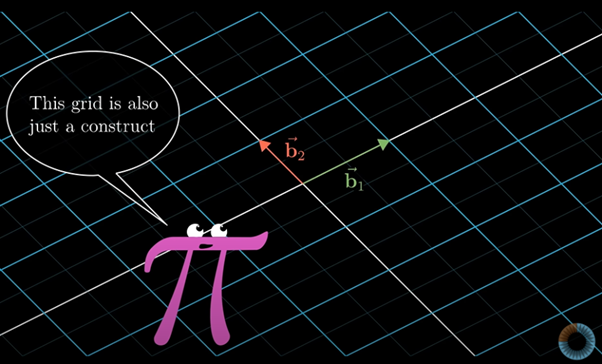
2차원 공간의 애니메이션을 그릴 때, 일반적으로 사각형의 격자를 사용한다.
하지만 이 그리드는 그냥 구조물일 뿐이다.
우리의 좌표 시스템을 시각화하는 방법으로써, 그리고 그리드는 우리가 선택하는 기저에 따라 달라진다.
공간 자체는 본질적으로 그리드를 갖고 있지 않기 때문이다.
제니퍼가 그녀만의 그리드를 그린다고 해도 그리드의 의미는 시각적인 도구에 지나지 않는다.
하지만, 제니퍼 좌표계의 원점은 실제로 우리가 일반적으로 생각하는 좌표계의 원점과 같을 것이다.
왜냐하면 어떤 좌표에서도 [0,0]은 같은 의미를 갖기 때문이다.
그러나 그녀의 축 방향, 그녀의 그리드 라인의 간격, 그녀가 선택한 기저 벡터에 따라 원점으로 의미하는 곳은 달라진다.
그렇다면 우리는 어떻게 다른 좌표계 사이를 해석해야할까?
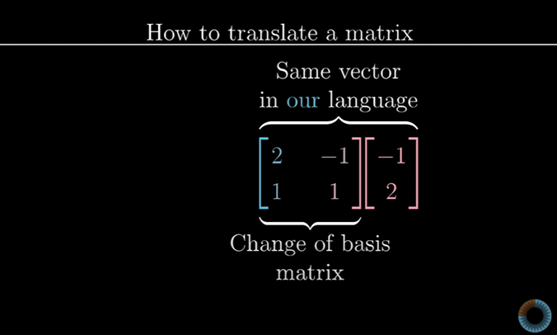
만일 예를 들어, 제니퍼는 벡터를 설명하는 경우 좌표값 [-1,2]j를 이용하는데 그것은 우리 좌표계에서 어떻게 될 것인가?
우리는 어떻게 그녀의 언어를 우리의 언어로 해석할 수 있을까?
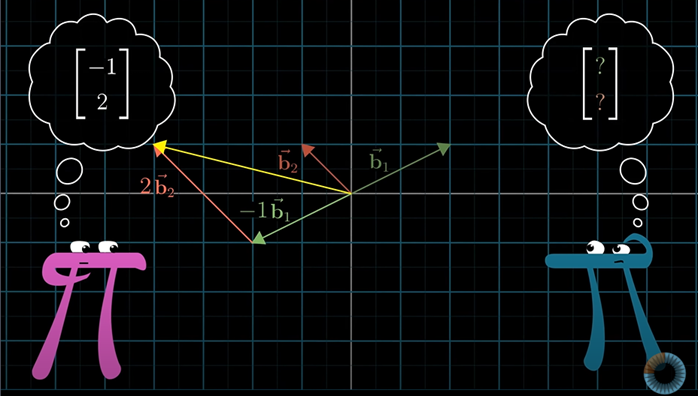
우리의 좌표가 말하는 것은 이 벡터가 b1에 -1을 곱하고 b2에 +2를 곱하라는 것이다.
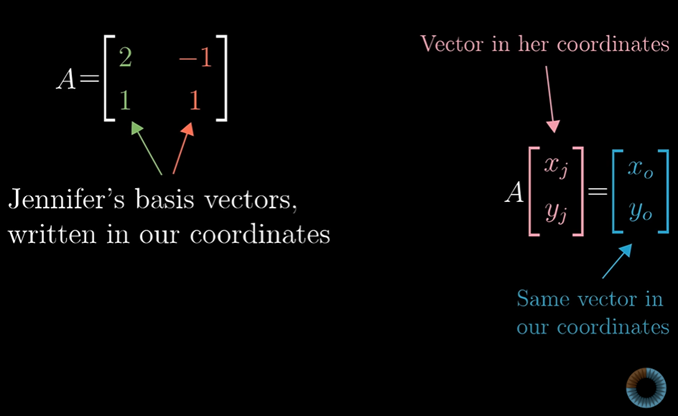
그리고 우리의 관점으로부터 b1은 좌표 [2,1]s를 갖고 b2는 [-1,1]s의 좌표를 갖는다
그래서 우리는 우리 좌표계에 표시하고 있는 벡터를 사용해서 실제 -1*b1+ 2*b2를 계산할 수 있다.
즉 우리는 좌표 [-4,1]s에 있는 벡터를 얻을 수 있다.
그래서 이것이 그녀가 생각하는 [-1,2]j를 우리의 언어로 표현하는 방법이다.
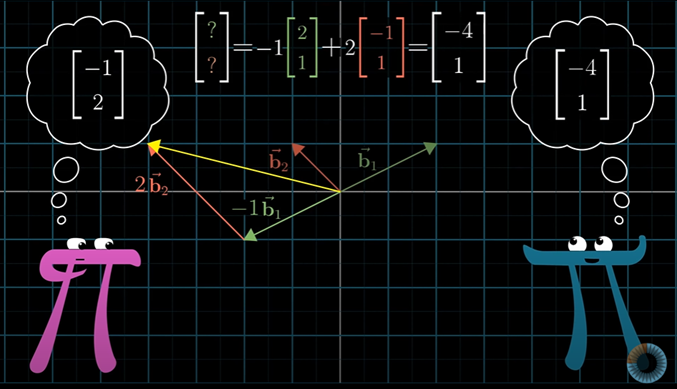
여기서, 그녀의 각 기저벡터의 스케일 [b1,b2]j는 일부 벡터의 좌표 [(2,1)s, (-1,1)s]에 해당한다.
그리고 그것들을 더함으로 얻을 수 있다.
이는 행렬과 벡터의 곱과 비슷해보인다.
우리의 언어로 표현된 제니퍼의 기저 상태를 나타내는 열들이 갖고 있는 행렬들의 곱 말이다.
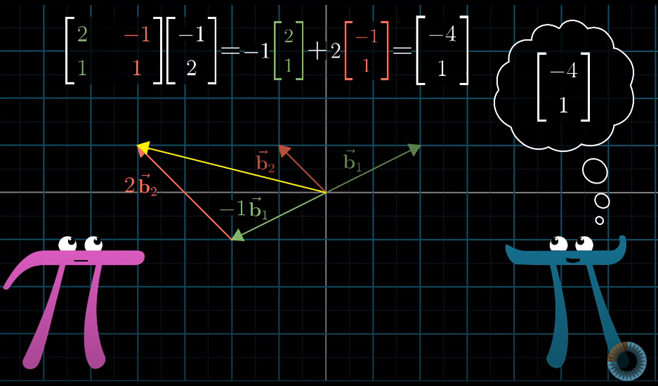
Chapter 3에서 배웠듯이, 제니퍼의 기저벡터를 나타내는 열을 갖고 있는 행렬은 선형변환으로 간주될 수 있다.
우리의 기저 벡터 i-hat 과 j-hat을 움직이는 변환으로 말이다.
우리가 말하는 [1,0]s, [0,1]s을 말하는 것은 제니퍼의 기저 벡터에서는 그녀가 말하는 [1,0]j, [0,1]j 가 되어버린다.
이것이 어떻게 작동하는지 보려면, 우리가 가진 좌표에서 [-1,2]s를 갖는 벡터의 의미가 무엇인지 살펴보자.
그리고 변환을 가해보자.
선형변환 전에 우리는 이 벡터를 우리 기준의 특정 선형 조합으로서 벡터 -1*i-hat + 2j-hat으로 나타낼 수 있다.
선형변환의 주요 기능은 그 결과가 다른 기저를 이용하여도 동일한 선형 결합 벡터가 된다는 점이다.
i-hat이 있던 장소에서 -1을 곱하고, j-hat이 있던 장소에서 2를 곱함으로써 말이다.
즉, 이 행렬이 하는 일은 우리의 좌표계에서의 벡터를 제니퍼의 좌표계의 벡터로 변환시키는 것이다.
기하학적으로, 이 행렬은 우리의 그리드를 제니퍼의 그리드로 바꾸는 것이다.
그러나 수치학적으로는, 그녀의 언어에서 우리의 언어로 번역하는 것이다.
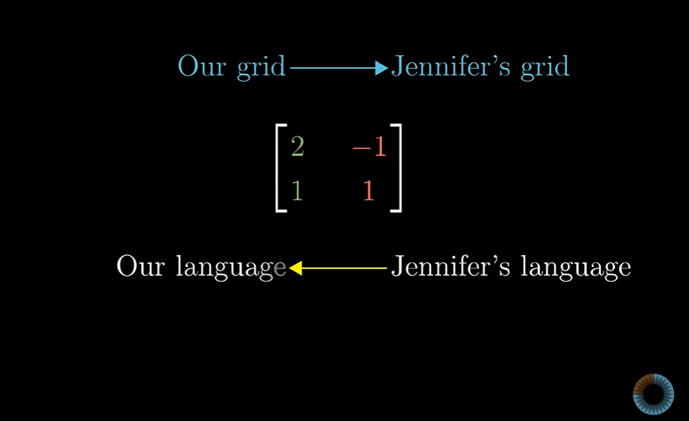
즉, 우리의 좌표계에서 벡터를 생각하고 그녀가 실제로 의미하는 벡터로 변환하는 것이다.
다른 방법으로 생각해보자
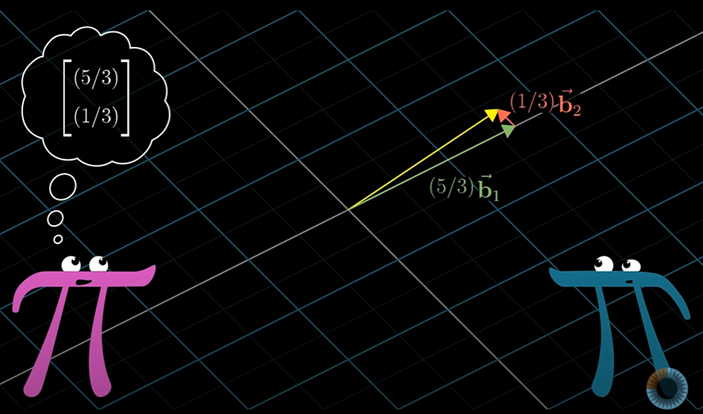
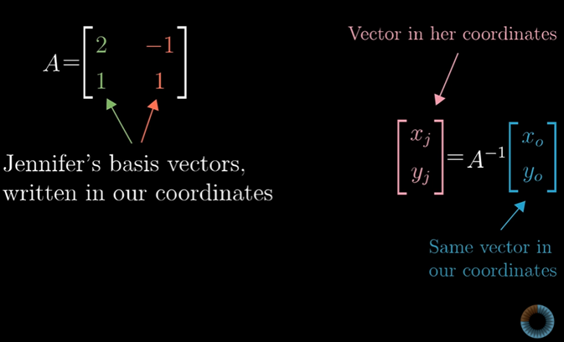
우리의 좌표계에서 [3,2]s를 가질 때 어떻게 우리는 이것이 제니퍼의 좌표계에서 [5/3, 1/3]j라고 계산할 수 있을까?
그것은 제니퍼의 언어를 우리의 언어로 번역하는 것이다. 그리고 그것의 역을 취한다.
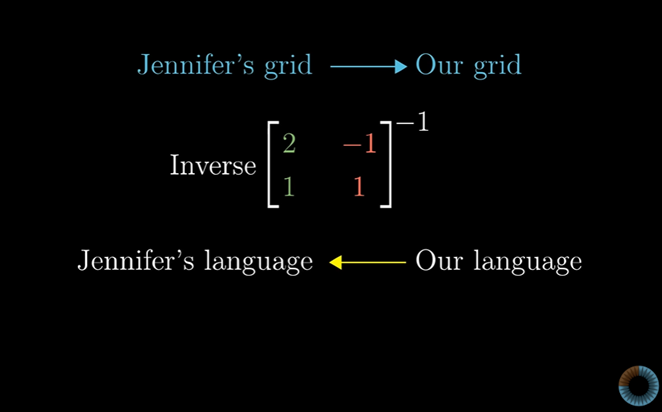
역변환이란 처음에 있던 곳으로 되돌리는 것에 대응하는 새로운 변환이다.
이 경우에, 제니퍼의 기저 벡터를 열행렬로 가지고 있는 기저 행렬의 역변환은 [1/3,-1,3][1/3,2/3]이 된다.
따라서 예를 들어, 제니퍼의 좌표계에서 [3,2]s를 보는 것은 우리는 이 기저행렬의 역행렬을 [3,2]s에 곱해야한다.
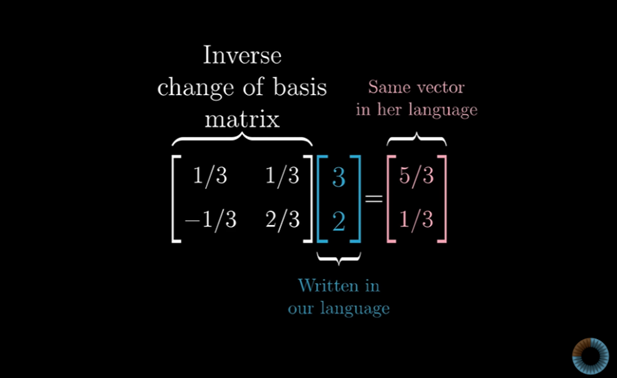
그러면 [5/3,1/3]j 가 나온다.
제니퍼의 기저 벡터를 가지고 있는 행렬은 우리의 좌표계로 나타내어 있지만, 그녀의 언어에서 우리의 언어로 벡터를 변환시켜준다.
그리고 역행렬은 반대로 작용한다.
그러나 벡터는 좌표계를 이용해서만 묘사되는 것이 아니다. 변환을 행렬로 생각하는 방법이 중요하다.
그리고 행렬 곱이 어떻게 연속적인 변환과 연관되는지 알게 될 것이다.
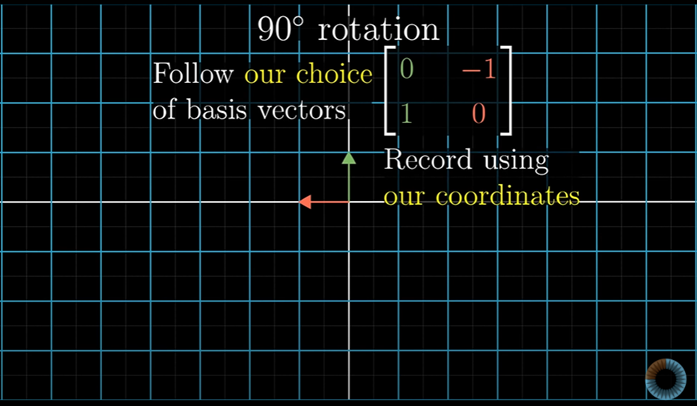
반시계 방향으로 90도 회전하는 선형변환을 생각해보자.
변환 후 i-hat은 [0,1]s에서 끝나고 j hat은 [-1,0]s에서 끝난다.
그렇기 때문에 각 좌표는 우리의 행렬의 열행렬으로써 쓰여질 수 있다.
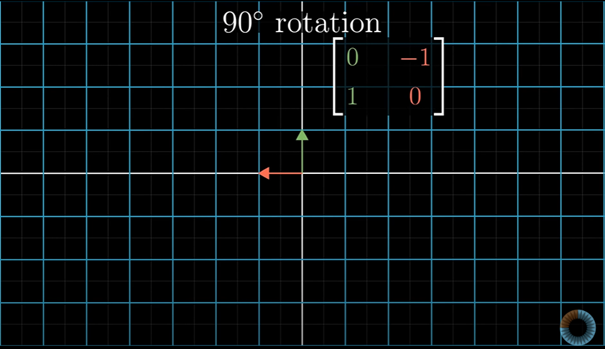
그러나 이 표현은 우리의 좌표계 안에서의 초기 기저 벡터에 제한되어있다.
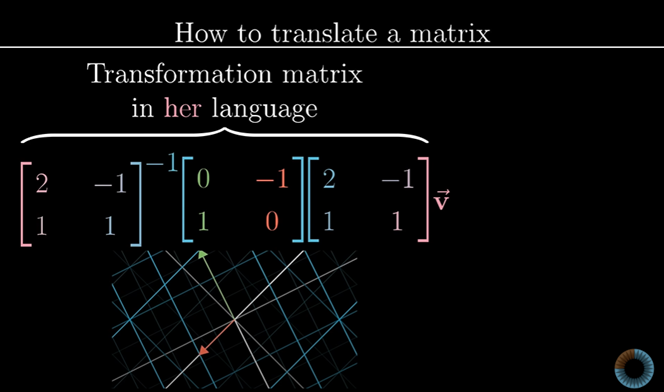
제니퍼는 같은 90도 변환을 어떻게 표현할 수 있을까?
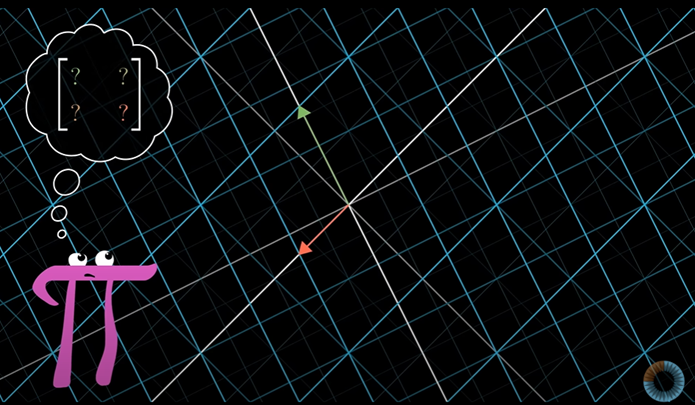
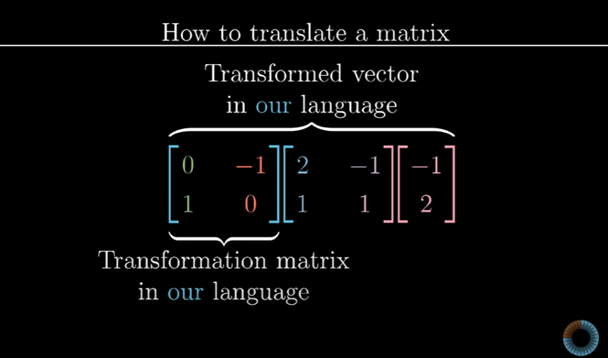
이는 제니퍼의 언어로 쓰여진 임의의 벡터로부터 시작한다.
그녀의 언어에서 무엇이 일어나는지 따라가기 보다는 먼저, 우리는 우리의 언어로 번역할 것이다.
기저 행렬의 변환을 사용해서 말이다.
열 벡터의 요소는 그녀의 기저 벡터가 우리 언어의 무엇을 말하는지 나타낸다.
그 다음에 얻어진 변환 행렬을 왼쪽에 곱한다.
이것은 어디로 벡터가 움직일지 알려준다. 하지만 여전히 우리 언어이다.
마지막 단계로써 기저 행렬의 역함수를 왼쪽으로 곱함으로써, 변환된 벡터를 얻을 수 있다.
제니퍼의 언어로 말이다.
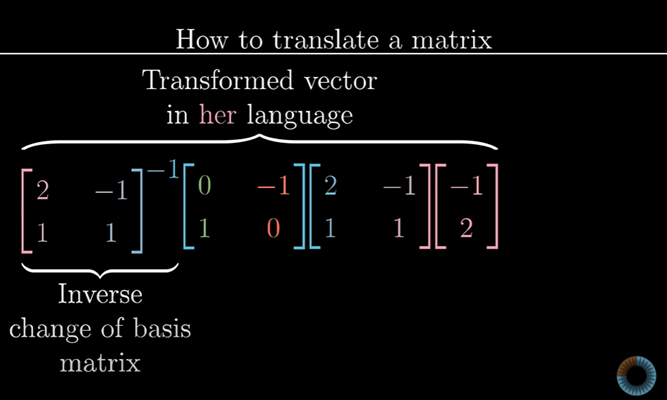
그녀의 언어로 작성된 모든 벡터에 대해서 우리는 이 과정을 적용할 수 있다.
먼저, 기저의 변환을 적용하고, 그리고 선형변환 후 그리고, 기저 벡터의 역변환을 통해서 말이다.
이 결과 새 행렬의 구성은 우리에게 제니퍼 변환 행렬을 제니퍼의 언어로 제공한다.
즉, 우리의 언어에서 [2,1]s 및 [-1,1]s인 제니퍼의 기저 벡터가 90도 회전될 때 이 세 가지 행렬의 곱으로써 나타내어 지고 계산결과 열이 [1/3, 5/3] 및 [-2/3,-1/3]이 된다.
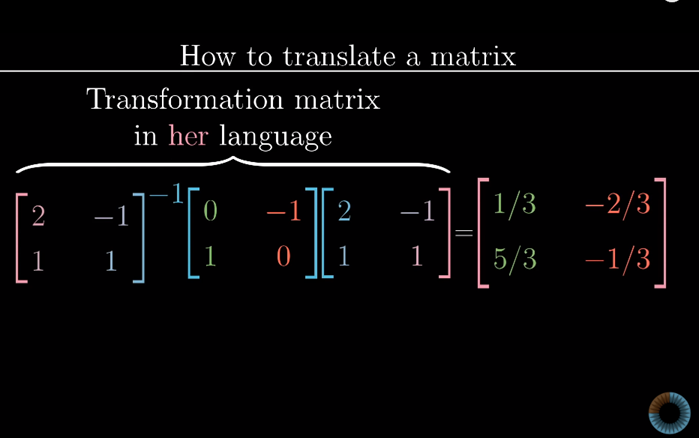
그래서 제니퍼가 이 결과 행렬을 그녀의 좌표계에 있는 벡터에 곱할 때 그것이 90도 회전된 벡터을 반환한다.
그녀의 좌표계로 표현되면서 말이다.
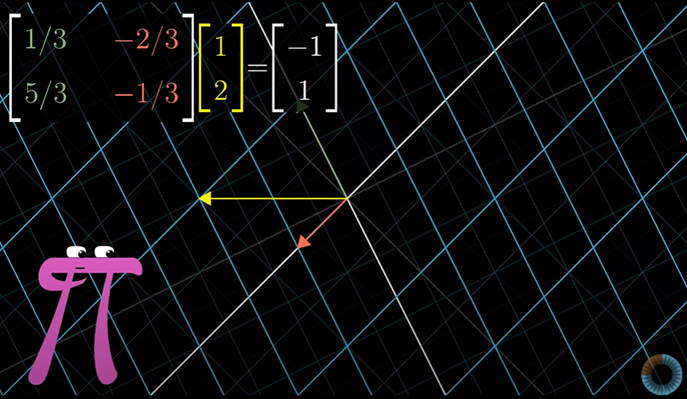
요약하자면, A^(-1)MA와 같은 표현을 볼 때마다 중간의 행렬 M은 선형 변환을 나타내고, 그리고 바깥쪽 행렬 A와 A^(-1)은 관점의 변환을 나타내는 것을 알아야한다.
그리고 총 행렬의 곱은 같은 변환을 나타내지만, 다만 기저가 다를 뿐이다.

'수학 > 선형대수학' 카테고리의 다른 글
| [3Blue1Brown] Chapter 15 | A quick trick for computing eigenvalues (0) | 2022.08.07 |
|---|---|
| [3Blue1Brown] Chapter 14 | Eigenvectors and eigenvalues (0) | 2022.08.07 |
| [3Blue1Brown] Chapter 11 | Cross products in the light of linear transformations (0) | 2022.08.04 |
| [3Blue1Brown] Chapter 10 | Cross products (0) | 2022.08.03 |
| [3Blue1Brown] Chapter 9 | Dot products and duality (0) | 2022.08.02 |
{학습 목적}
Chapter 13에서는 기저의 변환에 대해 학습한다.
기저의 변환이 왜 중요한 지는 이 챕터를 통해 깨닫지는 못했다.
하지만 기저의 변환을 통해 특정 벡터를 또 다른 관점에서 볼 수 있는 방법을 학습함으로써 선형 변환과 행렬의 곱을 통한 연속적인 변환의 역할이 기저의 변환에 쓰인다는 것을 통해 이들의 역할에 대해서 다시 한번 강조하는 것 같았다.
<기저의 변환>
만일 우리가 2d 공간에 있는 하나의 벡터를 놓는다면, 우리는 좌표를 사용해서 이 벡터를 묘사하는 기본적인 방법을 갖게 된다.
예를 들어 [3,2]좌표값을 갖는 벡터를 생각해보자
이것은 꼬리에서 머리까지 오른쪽으로 3칸 움직이고, 위로 2칸 움직인다는 것을 의미한다.
선형대수에서 좌표를 설명하는 방법은 각각의 숫자를 스칼라로 이루어져있다고 생각하는 것이다.
이 스칼라를 늘이거나 쪼그라든 벡터라고 생각하면서, 첫 번째 좌표를 i-hat이라 부르고,
그것은 길이가 1이고 오른쪽을 가르킨다고 생각한다.
두 번째 좌표 스케일인 j-hat은 길이가 1이고 위를 가르킨다고 생각한다.
이 두 개의 벡터를 머리와 꼬리를 이으면서 더하는 것은 좌표를 묘사하는 방법을 의미하는 것이다.
이러한 두 개의 특별한 벡터를 모든 좌표계의 임의의 가정을 포함하는 것으로 생각할 수 있다.
첫 번째 숫자는 오른쪽을 , 두번째 숫자는 윗 방향을 가르킨다는 사실은 정확한 단위 길이를 표시한다.
i-hat j-hat의 선택을 묶는 모든 것은 벡터로 되는 좌표는 스칼라이고 실제로 확장하기 위한 것이다.
즉, 벡터와 수의 집합을 연결하는 것을 좌표계(coordinate system)이라고 부른다.
그리고 두 특수 벡터, i-hat과 j-hat은 기저벡터(basis vector)라고 부른다. 우리의 표준 좌표계에서 말이다.
이 챕터에서 배우는 내용은 다른 기저 벡터의 집합을 사용하는 아이디어이다.
우리는 모두 공간 안에서 같은 벡터를 보고 있지만, 제니퍼(또 다른 사람)는 그것을 설명하기 위해 다른 단어와 숫자를 사용한다.
2차원 공간의 애니메이션을 그릴 때, 일반적으로 사각형의 격자를 사용한다.
하지만 이 그리드는 그냥 구조물일 뿐이다.
우리의 좌표 시스템을 시각화하는 방법으로써, 그리고 그리드는 우리가 선택하는 기저에 따라 달라진다.
공간 자체는 본질적으로 그리드를 갖고 있지 않기 때문이다.
제니퍼가 그녀만의 그리드를 그린다고 해도 그리드의 의미는 시각적인 도구에 지나지 않는다.
하지만, 제니퍼 좌표계의 원점은 실제로 우리가 일반적으로 생각하는 좌표계의 원점과 같을 것이다.
왜냐하면 어떤 좌표에서도 [0,0]은 같은 의미를 갖기 때문이다.
그러나 그녀의 축 방향, 그녀의 그리드 라인의 간격, 그녀가 선택한 기저 벡터에 따라 원점으로 의미하는 곳은 달라진다.
그렇다면 우리는 어떻게 다른 좌표계 사이를 해석해야할까?
만일 예를 들어, 제니퍼는 벡터를 설명하는 경우 좌표값 [-1,2]j를 이용하는데 그것은 우리 좌표계에서 어떻게 될 것인가?
우리는 어떻게 그녀의 언어를 우리의 언어로 해석할 수 있을까?
우리의 좌표가 말하는 것은 이 벡터가 b1에 -1을 곱하고 b2에 +2를 곱하라는 것이다.
그리고 우리의 관점으로부터 b1은 좌표 [2,1]s를 갖고 b2는 [-1,1]s의 좌표를 갖는다
그래서 우리는 우리 좌표계에 표시하고 있는 벡터를 사용해서 실제 -1*b1+ 2*b2를 계산할 수 있다.
즉 우리는 좌표 [-4,1]s에 있는 벡터를 얻을 수 있다.
그래서 이것이 그녀가 생각하는 [-1,2]j를 우리의 언어로 표현하는 방법이다.
여기서, 그녀의 각 기저벡터의 스케일 [b1,b2]j는 일부 벡터의 좌표 [(2,1)s, (-1,1)s]에 해당한다.
그리고 그것들을 더함으로 얻을 수 있다.
이는 행렬과 벡터의 곱과 비슷해보인다.
우리의 언어로 표현된 제니퍼의 기저 상태를 나타내는 열들이 갖고 있는 행렬들의 곱 말이다.
Chapter 3에서 배웠듯이, 제니퍼의 기저벡터를 나타내는 열을 갖고 있는 행렬은 선형변환으로 간주될 수 있다.
우리의 기저 벡터 i-hat 과 j-hat을 움직이는 변환으로 말이다.
우리가 말하는 [1,0]s, [0,1]s을 말하는 것은 제니퍼의 기저 벡터에서는 그녀가 말하는 [1,0]j, [0,1]j 가 되어버린다.
이것이 어떻게 작동하는지 보려면, 우리가 가진 좌표에서 [-1,2]s를 갖는 벡터의 의미가 무엇인지 살펴보자.
그리고 변환을 가해보자.
선형변환 전에 우리는 이 벡터를 우리 기준의 특정 선형 조합으로서 벡터 -1*i-hat + 2j-hat으로 나타낼 수 있다.
선형변환의 주요 기능은 그 결과가 다른 기저를 이용하여도 동일한 선형 결합 벡터가 된다는 점이다.
i-hat이 있던 장소에서 -1을 곱하고, j-hat이 있던 장소에서 2를 곱함으로써 말이다.
즉, 이 행렬이 하는 일은 우리의 좌표계에서의 벡터를 제니퍼의 좌표계의 벡터로 변환시키는 것이다.
기하학적으로, 이 행렬은 우리의 그리드를 제니퍼의 그리드로 바꾸는 것이다.
그러나 수치학적으로는, 그녀의 언어에서 우리의 언어로 번역하는 것이다.
즉, 우리의 좌표계에서 벡터를 생각하고 그녀가 실제로 의미하는 벡터로 변환하는 것이다.
다른 방법으로 생각해보자
우리의 좌표계에서 [3,2]s를 가질 때 어떻게 우리는 이것이 제니퍼의 좌표계에서 [5/3, 1/3]j라고 계산할 수 있을까?
그것은 제니퍼의 언어를 우리의 언어로 번역하는 것이다. 그리고 그것의 역을 취한다.
역변환이란 처음에 있던 곳으로 되돌리는 것에 대응하는 새로운 변환이다.
이 경우에, 제니퍼의 기저 벡터를 열행렬로 가지고 있는 기저 행렬의 역변환은 [1/3,-1,3][1/3,2/3]이 된다.
따라서 예를 들어, 제니퍼의 좌표계에서 [3,2]s를 보는 것은 우리는 이 기저행렬의 역행렬을 [3,2]s에 곱해야한다.
그러면 [5/3,1/3]j 가 나온다.
제니퍼의 기저 벡터를 가지고 있는 행렬은 우리의 좌표계로 나타내어 있지만, 그녀의 언어에서 우리의 언어로 벡터를 변환시켜준다.
그리고 역행렬은 반대로 작용한다.
그러나 벡터는 좌표계를 이용해서만 묘사되는 것이 아니다. 변환을 행렬로 생각하는 방법이 중요하다.
그리고 행렬 곱이 어떻게 연속적인 변환과 연관되는지 알게 될 것이다.
반시계 방향으로 90도 회전하는 선형변환을 생각해보자.
변환 후 i-hat은 [0,1]s에서 끝나고 j hat은 [-1,0]s에서 끝난다.
그렇기 때문에 각 좌표는 우리의 행렬의 열행렬으로써 쓰여질 수 있다.
그러나 이 표현은 우리의 좌표계 안에서의 초기 기저 벡터에 제한되어있다.
제니퍼는 같은 90도 변환을 어떻게 표현할 수 있을까?
이는 제니퍼의 언어로 쓰여진 임의의 벡터로부터 시작한다.
그녀의 언어에서 무엇이 일어나는지 따라가기 보다는 먼저, 우리는 우리의 언어로 번역할 것이다.
기저 행렬의 변환을 사용해서 말이다.
열 벡터의 요소는 그녀의 기저 벡터가 우리 언어의 무엇을 말하는지 나타낸다.
그 다음에 얻어진 변환 행렬을 왼쪽에 곱한다.
이것은 어디로 벡터가 움직일지 알려준다. 하지만 여전히 우리 언어이다.
마지막 단계로써 기저 행렬의 역함수를 왼쪽으로 곱함으로써, 변환된 벡터를 얻을 수 있다.
제니퍼의 언어로 말이다.
그녀의 언어로 작성된 모든 벡터에 대해서 우리는 이 과정을 적용할 수 있다.
먼저, 기저의 변환을 적용하고, 그리고 선형변환 후 그리고, 기저 벡터의 역변환을 통해서 말이다.
이 결과 새 행렬의 구성은 우리에게 제니퍼 변환 행렬을 제니퍼의 언어로 제공한다.
즉, 우리의 언어에서 [2,1]s 및 [-1,1]s인 제니퍼의 기저 벡터가 90도 회전될 때 이 세 가지 행렬의 곱으로써 나타내어 지고 계산결과 열이 [1/3, 5/3] 및 [-2/3,-1/3]이 된다.
그래서 제니퍼가 이 결과 행렬을 그녀의 좌표계에 있는 벡터에 곱할 때 그것이 90도 회전된 벡터을 반환한다.
그녀의 좌표계로 표현되면서 말이다.
요약하자면, A^(-1)MA와 같은 표현을 볼 때마다 중간의 행렬 M은 선형 변환을 나타내고, 그리고 바깥쪽 행렬 A와 A^(-1)은 관점의 변환을 나타내는 것을 알아야한다.
그리고 총 행렬의 곱은 같은 변환을 나타내지만, 다만 기저가 다를 뿐이다.
'수학 > 선형대수학' 카테고리의 다른 글
| [3Blue1Brown] Chapter 15 | A quick trick for computing eigenvalues (0) | 2022.08.07 |
|---|---|
| [3Blue1Brown] Chapter 14 | Eigenvectors and eigenvalues (0) | 2022.08.07 |
| [3Blue1Brown] Chapter 11 | Cross products in the light of linear transformations (0) | 2022.08.04 |
| [3Blue1Brown] Chapter 10 | Cross products (0) | 2022.08.03 |
| [3Blue1Brown] Chapter 9 | Dot products and duality (0) | 2022.08.02 |